Arduino, шаговый двигатель 28-byj48 и драйвер uln2003
Содержание:
- Характеристики микросхемы
- Спецификация и драйвер шагового двигателя
- Управление ULN2003
- Аналоги ULN2003
- Что случилось с вашей стиралкой?
- Как проверить микросхему?
- Ремонт стиральной машины Samsung WF6520S6V
- Практическое применение
- Зависимость входного напряжения и тока в нагрузке
- Проблема направления вращения в библиотеке и как ее исправить
- Схема одного из каналов в микросхемах ULN2003A, ULQ2003A и ULN2003AI.
- Скетч для управления мотором 28BYJ-48 с помощью arduino
- Измененный код для Arduino
- Схема подключения
- Микросхема ULN2003 — описание
Характеристики микросхемы
Как показывает практика использования представленной микросхемы, она является достаточно мощной, потому что судя по datasheet uln2003ag технические характеристики позволяют коммутировать достаточно большой ток до 500 мА. Но не стоит давать работать ей на пределе, потому что выходной транзистор хоть и защищен обратным диодом, он может пострадать из-за банального перегрева.
Читать также: Ту 3178 004 87879481 2010
Чтобы этого не происходило, правильно подходите к расчету потребляемой и рассеиваемой мощности. В данном случае при максимальном напряжении на CE равном 50 В максимальная мощность выходного транзистора составит не более 25 Вт, при этом он будет очень сильно греться. Поэтому номинальный коммутационный ток лучше поддерживать не более 300-400 мА. В таком режиме микросхема будет работать долго и стабильно.
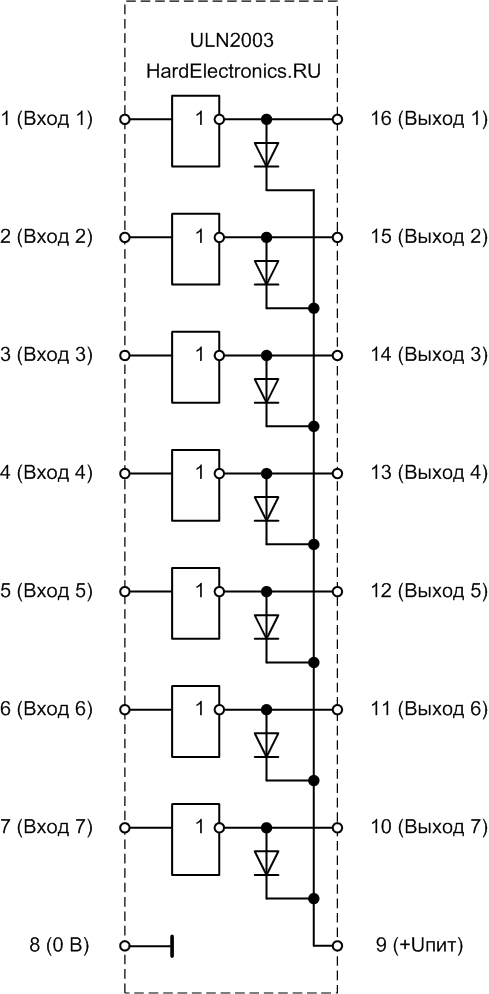
Структурная схема микросхемы до боли проста и состоит всего из 7 ячеек стандартной ТТЛ-логики И-НЕ с подключенным обратным диодом на общий вывод питания COM . С топологией устройства также все просто, каждый вход расположен напротив выхода, что не даст спутать выводы при проектировании каких-либо устройств. Главное запомнить, что первый вывод является прямым входом.
Что касается характеристик, то они представлены для микросхем с ТТЛ-логикой, при котором управляющий сигнал не превышает 5 В. Но также выпускаются аналоги КМОП, которые могут работать от более низкого порога около 2 В до 9 В.
https://youtube.com/watch?v=Cv3vrtfSszA
https://youtube.com/watch?v=8UzNJ7v3sBY
Спецификация и драйвер шагового двигателя
Существуют разные модели драйверов (контроллеров) шаговых двигателей. Среди них можно выделить самые популярные в DIY разработках на базе Arduino: L293, ULN2003, A3967SLB.
Как правило, шаговый двигатель 28-BYJ48 используют в паре с драйвером ULN2003.
Спецификацию шагового двигателя 28-BYJ48 на английском языке вы можете . Краткие выдержки основных технических характеристик приведены ниже:
- Напряжение питания: 5 В (постоянный ток);
- Количество фаз: 4;
- Количество шагов: 64;
- Угол поврота на один шаг: 5.625 градуса
- Частота: 100 Герц;
- Частота холостого хода по часовой стрелке: > 600 Герц;
- Частота холостого хода против часовой стрелки: > 1000 Герц;
- Крутящий момент > 34.3 миллиньютон на метр;
- Сопротивление вращению: 600-1200 грамм на сантиметр;
- Класс элетробезопасности: A;
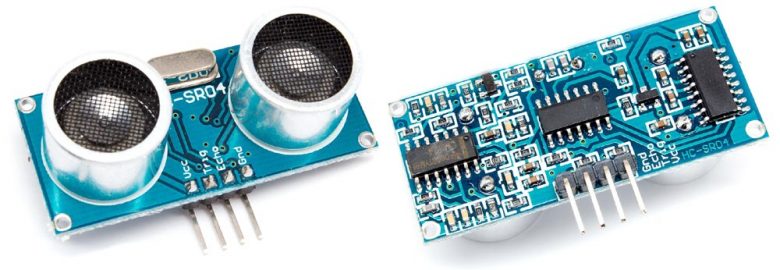
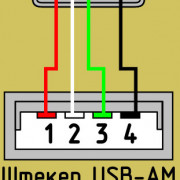
Внешний вид и схемы подключения ULN2003 приведены на изображениях ниже
Примечание. Если вы захотите использовать плату L293 вместо ULN2003, красный контакт подключать не надо.

Управление ULN2003
Входная часть сборок ULN2003A, ULN2003AI, ULQ2003A спроектирована так чтобы работать совместно с ТТЛ и 3,3 В и 5 В К-МОП логикой.
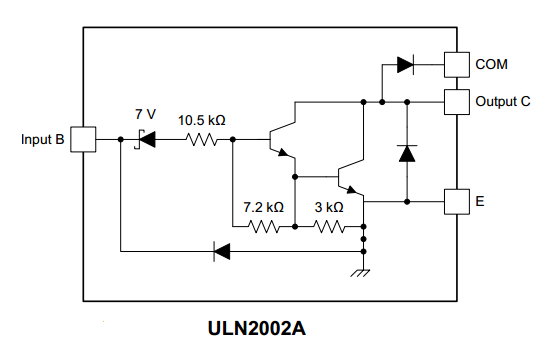
ULN2002A создана для p-МОП логики. Во входных цепях ULN2002A добавлен стабилитрон на 7 В и увеличено сопротивление базового резистора до 10,5 кОм, благодаря этому сборка может работать с входными напряжениями от 14 до 25 В.
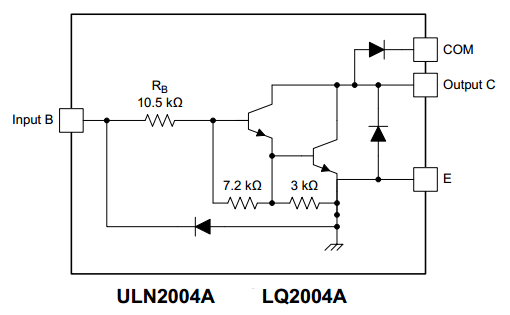
Сборка ULN2004A, ULQ2004A предназначена для К-МОП логики с уровнем напряжений от 6 до 15В. По сравнению с ULN2003, у ULN2004 просто увеличено сопротивление базового резистора до 10,5 кОм.
Как можно видеть на структурной схеме, входы и выходы расположены напротив друг друга, что весьма удобно при разводке печатной платы.
ULN2003 выпускается как для объемного монтажа: PDIP, так и для поверхностного: SOIC, SOP и TSSOP.
Аналоги ULN2003
Разные зарубежные производители выпускают свои аналоги ULN2003: L203, MC1413, SG2003, TD62003. Так же есть и отечественный аналог: К1109КТ22.
8-ми канальный драйвер нагрузки ULN2803A, ULN2804A
Для работы с микроконтроллерами может быть более удобнымы 8-ми канальные драйверы. И у семиканальных ULN2003, ULN2004 есть их восьмиканальные братья ULN2803, ULN2804.
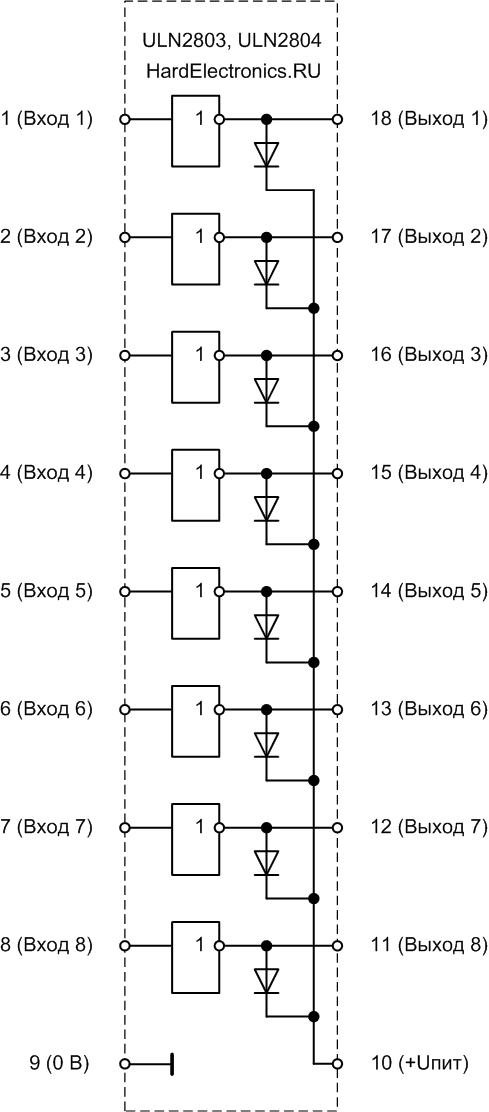
Точно также как и ULN2003 — ULN2803 рассчитан на управление от ТТЛ-логики и низковольной К-МОП, а ULN2804 от К-МОП питающейся в диапазоне 6 .. 15 В. Отличия ULN280X от ULN200X только в дополнительном канале и 18-выводном корпусе. У ULN2803А есть отечественный аналог: К1109КТ63.
Драйверы нагрузки ULN2023A, ULN2024A
Третья двойка в названии сборки вместо нуля означает, что выходное напряжение может достигать 95 В
, в остальном параметры и схемотехника этих сборок повторяют своих собратьев.
Что случилось с вашей стиралкой?
Машинки Самсунг WF6520S6V функциональные и высокотехнологичные. Но их поломки обычно такие же, как и у более простых моделей. Как правило, к неисправностям приводит неправильная эксплуатация, ошибки при установке или плохие условия работы (жесткая вода, скачки напряжения). Чаще всего у Samsung WF6520S6V выходят из строя:
- двигатель;
- блок управления;
- переключатель;
- сливной шланг или помпа;
- ремни, щетки, подшипники.
Что делать при поломке?
Любая неисправность Самсунг WF6520S6V – это не приговор, а лишь повод обратиться к мастеру. Сделайте это как можно скорее, и ваша стиралка будет спасена:
- Наши специалисты умеют устранять как простые, так и самые сложные поломки машин Samsung.
- У нас есть все необходимые запчасти для WF6520S6V.
- Мастер приедет к вам на дом в любое удобное время и отремонтирует стиральную машину за пару часов.
- После ремонта вы получите гарантию и на работу, и на установленные запчасти (если придется выполнить замену).
Кроме того, у нас лучшие цены на ремонт стиральных машин Samsung WF6520S6V в Санкт-Петербурге. Звоните прямо сейчас – возможно, наш мастер отремонтирует вашу стиралку уже сегодня!
Отремонтировать Вашу технику можем уже сегодня!
Как проверить микросхему?
Обычно на руках у радиолюбителя всяческие микросхемы появляются из других устройств, которые были разобраны очень давно, и уже нет никакой информации о состоянии его компонентов, поэтому вопрос, как проверить uln 2003a вполне актуален. А сделать это можно достаточно просто:
Прозвонить мультиметром. С его помощью можно выяснить пробит ли диод или сам транзистор. Если что-то пробито (звонится на КЗ или около), то в любом случае эта ячейка неисправна. Базу прозвонить таким способом не удастся, потому что на входе имеется резистор сопротивлением 2,7 кОм. Лучше попробовать включить открыть транзистор, подав на вход напряжение величиной не более 3,85 В.
Делался прибор по схеме:На 1-7 ножку колодки(куда будет сажаться DIP-микросхема или переходник на SMD микросхему)припаиваются кнопки на замыкание(любые в зависимости от будущего корпуса)у меня корпус -подкассетник от обычной аудио кассеты.
Второй вывод кнопки соединяются все вмести и через резистор 1кОм соединяется с плюсом.На 8 и 9 ножку питание 12 вольт от блока питания или как я сделал от DC-DC преобразователь(покупал в Китае).На 10-16 припаиваются светодиоды(любые какие есть,но при этом все одинаковые) аноды светодиодов соединяются вместе и через резистор соединяется с плюсом.Резистор подбирается от 700 Ом-2 кОм в зависимости от светодиода .
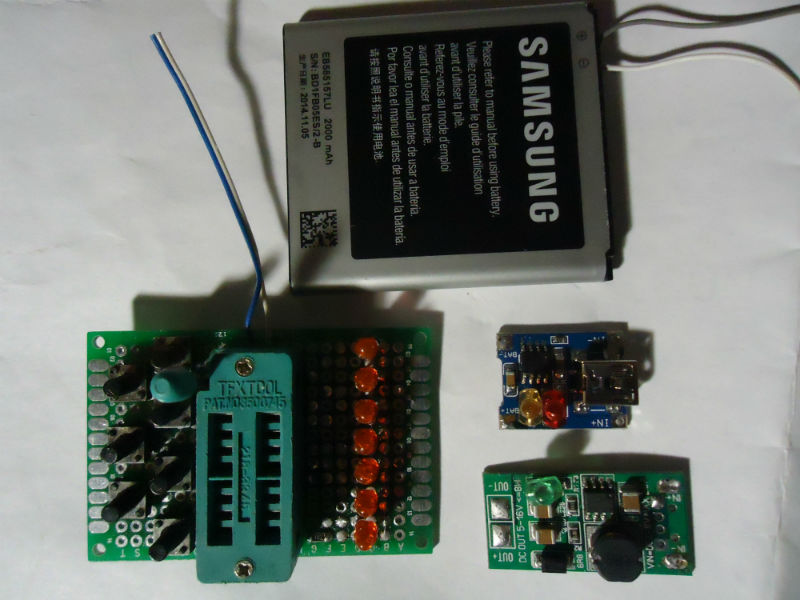
Принцип работы-как только замыкаешь одну из кнопок на 1-7 ножку микросхемы приходит положительный потенциал и засвечивается светодиод.Если при установки микросхемы какой то диод засвечивается то пробит ключ в микросхеме или наоборот при замыкании кнопки какой то диод не светится-значит обрыв ключа.Если пользоваться блоком питания,то на 9 ножку нужно установить ограничивающий резистор 5-20 Ом(для того если проверяющая микросхема пробита).В моей ситуации DC-DC преобразователь отключает питание при замыкании.

В качестве батарейки любой Li-on аккумулятор и зарядник. Можно просто две батарейки на 1.5 вольта и зарядник не нужен.Для меня проблема было достать подкасетник(так как в своё время всё выкинул) и переходник с DIP16 на SOP16 (заказывал в Китае 230 рублей и ждал месяц) остальное всё из доноров.Колодка от старого программатора.Всё спасибо.
Делался прибор по схеме:На 1-7 ножку колодки(куда будет сажаться DIP-микросхема или переходник на SMD микросхему)припаиваются кнопки на замыкание(любые в зависимости от будущего корпуса)у меня корпус -подкассетник от обычной аудио кассеты.
Второй вывод кнопки соединяются все вмести и через резистор 1кОм соединяется с плюсом.На 8 и 9 ножку питание 12 вольт от блока питания или как я сделал от DC-DC преобразователь(покупал в Китае).На 10-16 припаиваются светодиоды(любые какие есть,но при этом все одинаковые) аноды светодиодов соединяются вместе и через резистор соединяется с плюсом.Резистор подбирается от 700 Ом-2 кОм в зависимости от светодиода .
Принцип работы-как только замыкаешь одну из кнопок на 1-7 ножку микросхемы приходит положительный потенциал и засвечивается светодиод.Если при установки микросхемы какой то диод засвечивается то пробит ключ в микросхеме или наоборот при замыкании кнопки какой то диод не светится-значит обрыв ключа.Если пользоваться блоком питания,то на 9 ножку нужно установить ограничивающий резистор 5-20 Ом(для того если проверяющая микросхема пробита).В моей ситуации DC-DC преобразователь отключает питание при замыкании.
В качестве батарейки любой Li-on аккумулятор и зарядник. Можно просто две батарейки на 1.5 вольта и зарядник не нужен.Для меня проблема было достать подкасетник(так как в своё время всё выкинул) и переходник с DIP16 на SOP16 (заказывал в Китае 230 рублей и ждал месяц) остальное всё из доноров.Колодка от старого программатора.Всё спасибо.
Ремонт стиральной машины Samsung WF6520S6V
Цены на популярные неисправности
- Не включается /не запускается
Текущие акции и скидки
1. Если результат работы вас не устроил…
Мы переделаем свою работу бесплатно.
2. Если вы не хотите повторного ремонта…
Мы вернем вам деньги.
Подробнее на странице — гарантии.
Сделайте перезагрузку, чтобы сбросить ошибки. Если это не поможет, значит, нужна замена электронного модуля. Возможно, мастер сможет его отремонтировать. Но в любом случае обратитесь к хорошему специалисту. Самостоятельно такую проблему не устранить.
Сделайте перезагрузку, чтобы сбросить ошибки. Если это не поможет, значит, нужна замена электронного модуля. Возможно, мастер сможет его отремонтировать. Но в любом случае обратитесь к хорошему специалисту. Самостоятельно такую проблему не устранить.
Осмотрите сетчатый фильтр: нет ли там засора. Подключите сливной шланг правильно.
- Проверьте уровень напряжения в сети. Если оно слишком низкое, дождитесь нормального или установите стабилизатор. Такая ошибка может возникать из-за скачков напряжения.
- Перезагрузите стиральную машину. Возможно, в электронном модуле случился сбой. Также не исключена поломка — в таком случае модуль придется заменить или перепрошить.
- Проверьте шнур питания машинки: нет ли повреждений. При обнаружении дефектов замените его.
- Прозвоните проводку двигателя, чтобы исключить повреждения контактов, которые соединяют двигатель с электронным модулем. Поврежденные участки нужно заменить.
Для использования сервиса начните вводить название кода ошибки, затем выберите нужный вариант из выпадающего списка. В результате Вы получите описание предполагаемой неисправности и советы по её устранению.
Стиральные машины Самсунг WF6520S6V надежные и удобные. А еще они очень долговечные, поэтому не стоит при первой же поломке искать себе новую технику. Лучше позаботиться о профессиональном ремонте неисправной стиралки. Если вы живете в Санкт-Петербурге, просто обратитесь в «Клуб Ремонта». Наш мастер сделает быстрый и качественный ремонт стиральной машины Samsung WF6520S6V с выездом на дом в любую точку СПб.
Практическое применение
 Сфера применения микросхемы uln 2003 достаточно широкая и охватывает как промышленность, так и детские игрушки с целью развлечения. Например, ее можно применить в устройстве переключения бегущих огней, собранных на мощных светодиодах или даже лампочках с общим питание не более 50 В. U ln2003 биполярный шаговый двигатель может вращать, потому что у нее достаточно выводов, чтобы выполнить целый оборот с позиционированием. Как пример, можно организовать управление вентиляторным шаговым двигателем посредством параллельного порта, собрав небольшую схему с подключением к цифровым выходам интерфейса из линии DATA .
Сфера применения микросхемы uln 2003 достаточно широкая и охватывает как промышленность, так и детские игрушки с целью развлечения. Например, ее можно применить в устройстве переключения бегущих огней, собранных на мощных светодиодах или даже лампочках с общим питание не более 50 В. U ln2003 биполярный шаговый двигатель может вращать, потому что у нее достаточно выводов, чтобы выполнить целый оборот с позиционированием. Как пример, можно организовать управление вентиляторным шаговым двигателем посредством параллельного порта, собрав небольшую схему с подключением к цифровым выходам интерфейса из линии DATA .
А если использовать в составе с микроконтроллером, то можно организовать полноценное управление релейной схемой с током потребления по каждому из каналов не более 300 мА.
Зависимость входного напряжения и тока в нагрузке
При разработке схем с участием представленной микросхемы необходимо учитывать порог регулирования тока, который зависит нелинейной характеристикой от входного напряжения:
- В ТТЛ-логике при входном напряжении 2,4 В ток коммутации составляет не более 200 мА.
- При U вх.=2,7В, выходной ток не превышает 250 мА.
- При величине входного напряжения не более 3 В, ток коллектора выходного транзистора составляет 300 мА.
Также в устройстве присутствует паразитная емкость, которая может достигать 25 pF в зависимости от частоты управляющего напряжения или создаваемых помех в непосредственной близости от нее. При этом минимальный порог паразитной емкости находиться на уровне 15 пФ. Что касается времени включения выходных транзисторов, то они являются достаточно быстрыми. Время перехода из одного состояния в другое лежит в пределах от 0,25 до 1 мкс, что говорит о возможности работы на достаточно высоких частотах.
Исходя из описания на микросхему, максимальный ток составляет 0,5 А, но в таком режиме она существенно нагревается до 70 и более градусов, что может быть критичным. Ведь максимальная температура, при которой микросхема еще нормально работает, составляет порядка 85 градусов. Также следует отметить, что максимальный входной ток управления при напряжении 3,85 В не должен превышать 1,35 мА. А это немаловажный факт, потому что именно по входу у многих схемотехников она выходит из строя.
На следующих диаграммах показана зависимость входного и выходного токов, которая является практически линейной, что позволяет более качественно подобрать элементы схемы, обеспечив нормальный температурный режим для стабильной работы устройства. Более подробно узнать о свойствах микросхемы можно из datasheet, который можно скачать на сайте.
Проблема направления вращения в библиотеке и как ее исправить
Когда вы загрузите скетч на Arduino, шаговый двигатель будет вращаться в одном направлении с помощью функции:
step(steps);
То есть, вам надо указать в параметрах количество шагов для поворота ротора вала.
По идее, указав положительное или отрицательное значение, вы можете управлять направлением вращения. Если ваш шаговый двигать так и работает, то можете не читать дальше.
Но если шаговый двигатель вращается в том же направлении вне зависимости от знака, то надо внести изменения в библиотеку Arduino. В следующем разделе приведен код, используя который вы можете управлять направлением вращения.
Схема одного из каналов в микросхемах ULN2003A, ULQ2003A и ULN2003AI.
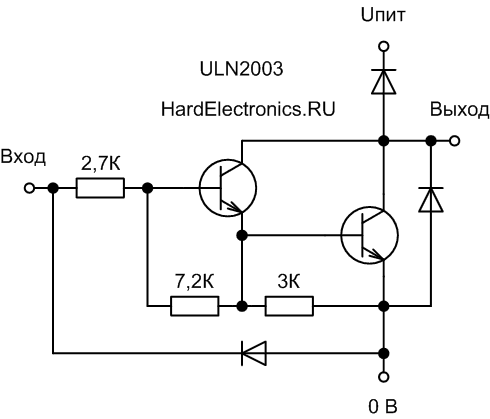
Каждый из семи каналов содержит по два биполярных транзистора, резистор 2,7 кОм ограничивающий базовый ток, и два резистора на 7,2 кОм и 3 кОм защищающие транзисторы от открывания обратным током коллектора. Кроме того к схеме добавлены три защитных диода: первый защищает вход от отрицательного напряжения, два других защищают выход от отрицательного напряжения и от превышения напряжения на транзисторах выше питающего.
Наличие защитных выходных диодов актуально при работе на индуктивную нагрузку: диод для шунтирования обмотки реле или обмотки шагового двигателя уже встроен в микросхему и не нужно устанавливать внешний диод. А при использовании 7 каналов – 7 внешних диодов.
Скетч для управления мотором 28BYJ-48 с помощью arduino
Для работы с шаговыми моторами существует несколько библиотек, одна из них даже есть в стандартном наборе IDE, но на мой взгляд удобнее всего использовать AccelStepper. Скачать ее можно по этой ссылке: скачать.
Ниже приведен код скетча с подробными комментариями.
// библиотека для управления мотором
#include <AccelStepper.h>
// пины
#define motorPin1 8 // IN1 на драйвере ULN2003
#define motorPin2 9 // IN2 на драйвере ULN2003
#define motorPin3 10 // IN3 на драйвере ULN2003
#define motorPin4 11 // IN4 на драйвере ULN2003
int analog_pin = A0; // пин для потенциометра
// подключение мотора
// пины и количество шагов на оборот(8)
AccelStepper stepper_motor(8, motorPin1, motorPin3, motorPin2, motorPin4);
void setup(){
// максимальная скорость мотора
stepper_motor.setMaxSpeed(500);
// дефолтная скорость мотора
stepper_motor.setSpeed(200);
}
void loop(){
// читаем значение с потенциометра
int val_a = analogRead(analog_pin);
// получаем скорость(от 50 до 500) относительно значения потенциометра(от 0 до 1023)
int motorSpeed = map(val_a, 0, 1023, 50, 500);
// задаем скорость мотору
stepper_motor.setSpeed(motorSpeed);
// вращаем мотор
stepper_motor.runSpeed();
}
Измененный код для Arduino
Окончательная версия скетча для шагового двигателя:
/* Скетч для шагового двигателя BYJ48
Схема подключения: IN1 >> D8 IN2 >> D9 IN3 >> D10 IN4 >> D11 VCC … 5V.
Лучше использовать внешний источник питания Gnd
Автор кода: Mohannad Rawashdeh
Детали на русском языке: /arduino-shagovii-motor-28-BYJ48-draiver-ULN2003
Англоязычный вариант: http://www.instructables.com/member/Mohannad+Rawashdeh/ 28/9/2013 */
#define IN1 8
#define IN2 9
#define IN3 10
#define IN4 11
int Steps = 0;
boolean Direction = true;
unsigned long last_time;
unsigned long currentMillis ;
int steps_left=4095;
long time;
void setup()
{
Serial.begin(115200);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
// delay(1000);
}
void loop()
{
while(steps_left>0){
currentMillis = micros();
if(currentMillis-last_time>=1000){
stepper(1);
time=time+micros()-last_time;
last_time=micros();
steps_left—;
}
}
Serial.println(time);
Serial.println(«Wait…!»);
delay(2000);
Direction=!Direction;
steps_left=4095;
}
void stepper(int xw){
for (int x=0;x<xw;x++){
switch(Steps){
case 0:
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
break;
case 1:
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, HIGH);
break;
case 2:
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
break;
case 3:
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
break;
case 4:
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
break;
case 5:
digitalWrite(IN1, HIGH);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
break;
case 6:
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
break;
case 7:
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
break;
default:
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
break;
}
SetDirection();
}
}
void SetDirection(){
if(Direction==1){ Steps++;}
if(Direction==0){ Steps—; }
if(Steps>7){Steps=0;}
if(Steps
}
Видео работающего мотора приведено ниже:
Но есть и более интересный вариант — написать собственную библиотеку для шагового двигателя
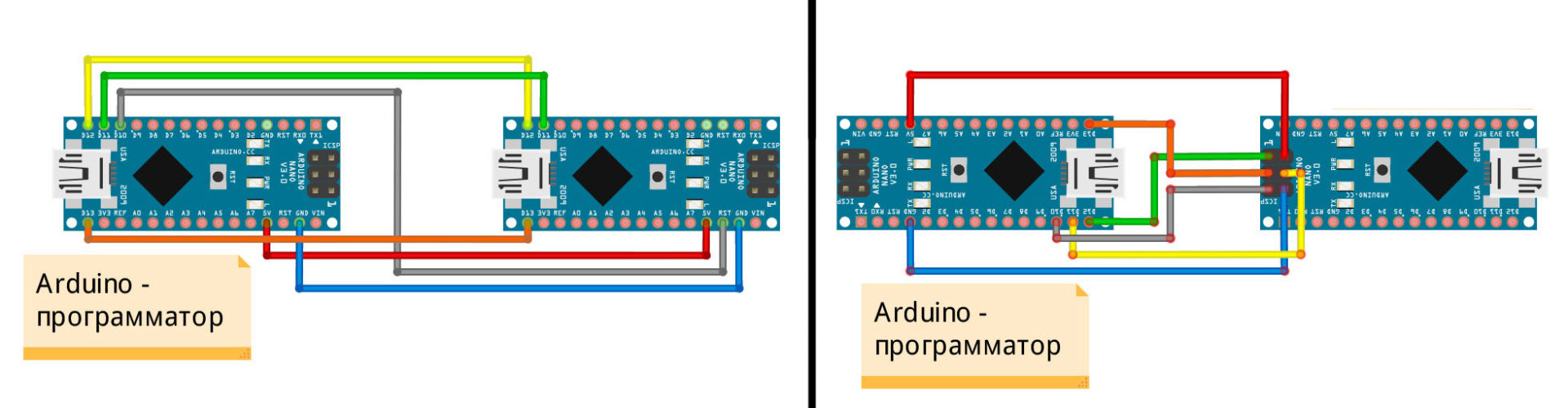
Схема подключения
На uln 2003 схема подключения до боли проста и не включает никаких компонентов. Главное, не перепутать вход с выходом и общий вывод, в остальном все и так ясно. Но все же для наглядности стоит повторить схему на примере с шаговым двигателем с питанием от 12 до 24 В. Общий провод от +24В подключается на 9 вывод и к центральному отводу обмоток двигателя, все остальные оп порядку согласно полюсам. Управление двигателем осуществляется по аналогичным линиям, только со входа МС.
При работе в таком режиме вероятность спалить выходной транзистор достаточно большая, потому что короткое замыкание в двигателе никто еще не отменял, точно также, как и клин ротора, из-за чего ток может существенно возрасти. Поэтому в каждую линию управления по выходу можно поставить шунт и обрисовать его схемой защиты от КЗ. Это зависит от конкретной задачи и типа устройства, в котором эта микросхема применяется.
Микросхема ULN2003 — описание

Краткое описание ULN2003a. Микросхема ULN2003a — это транзисторная сборка Дарлингтона с выходными ключами повышенной мощности, имеющая на выходах защитные диоды, которые предназначены для защиты управляющих электрических цепей от обратного выброса напряжения от индуктивной нагрузки.
Каждый канал (пара Дарлингтона) в ULN2003 рассчитан на нагрузку 500 мА и выдерживает максимальный ток до 600 мА. Входы и выходы расположены в корпусе микросхемы друг напротив друга, что значительно облегчает разводку печатной платы.
ULN2003 относится к семейству микросхем ULN200X. Различные версии этой микросхемы предназначены для определенной логики. В частности, микросхема ULN2003 предназначена для работы с TTL логикой (5В) и логических устройств CMOS. Широкое применение ULN2003 нашло в схемах управления широким спектром нагрузок, в качестве релейных драйверов, драйверов дисплея, линейных драйверов и т. д. ULN2003 также используется в драйверах шаговых двигателей.
Сегодня вы узнаете о четырехфазном шаговом двигателе 28BYJ-48, работающим от постоянного напряжения 5 Вольт. Также существует его модификация на 12 Вольт. Двигатель потребляет значительный ток, а это значит, что мы не можем подключить его напрямую к выводам Arduino. Воспользуемся для этого драйвером двигателя на микросхеме ULN2003.
Технические параметры двигателя 28BYJ-48
- Модель: 28BYJ-48
- Тип двигателя: Униполярный
- Напряжение питания: 5 Вольт, DC
- Количество фаз: 4
- Частота: 100 Гц
- Сопротивление: 50Ω ± 7% (при 25 ℃)
Общие сведения о движке
4-х фазный шаговый двигатель 28BYJ-48 — это бесколлекторный двигатель, имеющий дискретное перемещение (вращение вала осуществляется шагами). На роторе (валу), расположен магнит, а вокруг него находятся катушки. Подавая поочередно ток на эти катушки, создается магнитное поле, которое отталкивает или притягивает магнитный вал, заставляя двигатель вращаться. Такая конструкция позволяет с большой точностью управлять валом, относительно катушек. Принципиальная схема четырехфазного шагового двигателя 28BYJ-48 приведена ниже.
Двигатель называется четырех фазным, из-за того, что в нем содержится две обмотки, которые, в свою очередь, разделены на четыре. (Это отражено на схеме выше). Центральные отводы катушек подключены вместе и служат для питания двигателя. Так как каждая обмотка подключена к питанию, такие двигатели называют униполярными. На роторе 28BYJ-48 расположено 8 магнитов, с чередующимися полюсами (то есть, четыре магнита с двумя полюсами).
На рисунке видно, что внутри расположен редуктор, с примерным передаточным числом в 1:64, если быть точнее 1:63,68395. Это значит, что двигатель за один оборот осуществляет 4075.7728395 шага. Данный двигатель поддерживает полушаговый режим и за один полный оборот может совершать 4076 шага, а точнее за 1° делает примерно 11,32 шага. (4076 / 360 = 11,32).
Режимы работы двигателя:
Чаще всего, при использовании шагового двигателя 28BYJ 48, используют два режима подключения.
- Полушаговый режим — за 1 такт, ротор делает ½ шага.
- Полношаговый режим — за 1 такт, ротор делает 1 шаг.
Ниже представлены таблицы последовательности тактов:
Модуль управления шаговым двигателем ULN2003:
Цифровой вывод микроконтроллера выдает ток до
40 мА, а одна обмотка 28BYJ-48 в пике потребляет
320 мА, то есть, если подключить двигатель напрямую, микроконтроллер сгорит. Для защиты был разработан модуль шагового двигателя ULN2003, в котором используется микросхема ULN2003A (состоящая из 7 ключей), которая позволяет управлять нагрузкой до 500 мА (один ключ). Данный модуль может работать с 5 Вольтовым и 12 Вольтовым двигателем 28BYJ-48. Для переключения необходимо установить или убрать перемычку (по умолчанию перемычка установлена на питание 5 Вольт).
С принципиальной схемой модуля ULN2003 можно ознакомиться на рисунке ниже
- 1 — GND: «-» питание модуля
- 2 — Vcc: «+» питание модуля (5В или 12В)
- 3 — Vcc: «+» питание модуля (перемычка, только при 5В)
- 4 — Vcc: «+» питание модуля (перемычка, только при 5В)